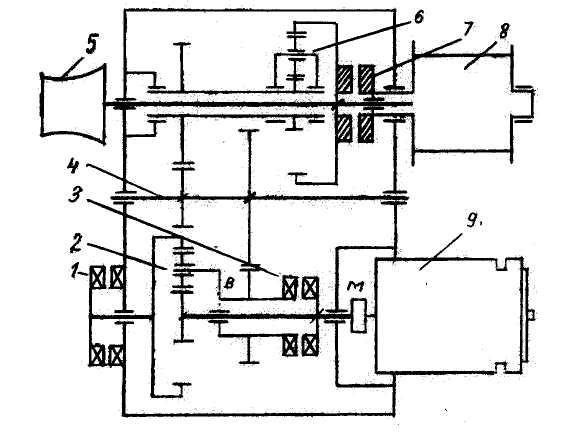
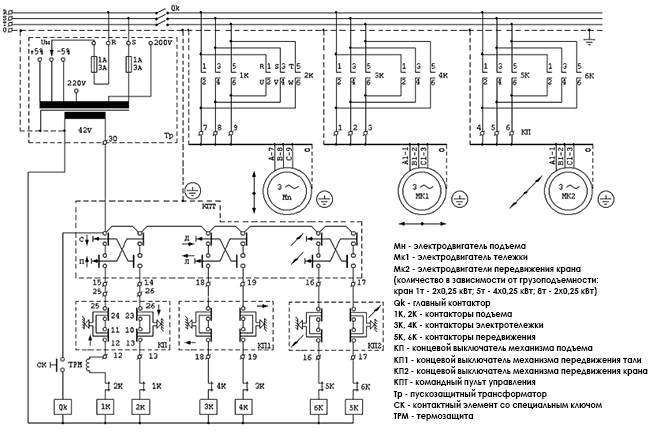
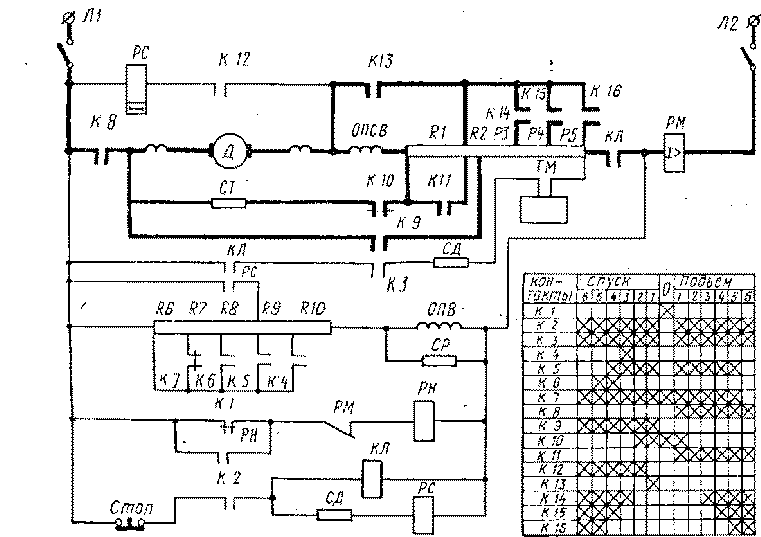
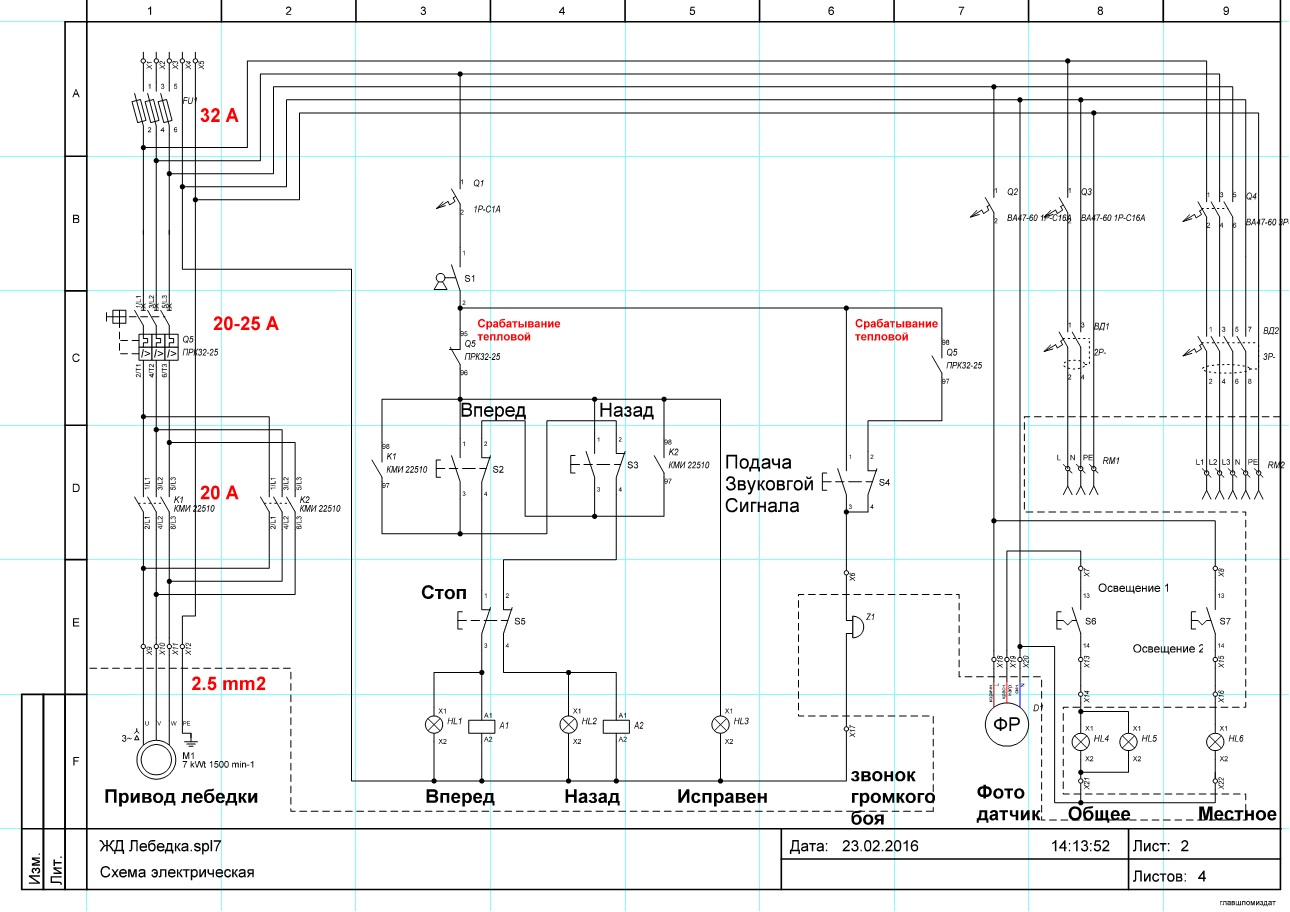
Электрическая схема электропривода лебедки

§ 62. Электропривод шлюпочной лебедки
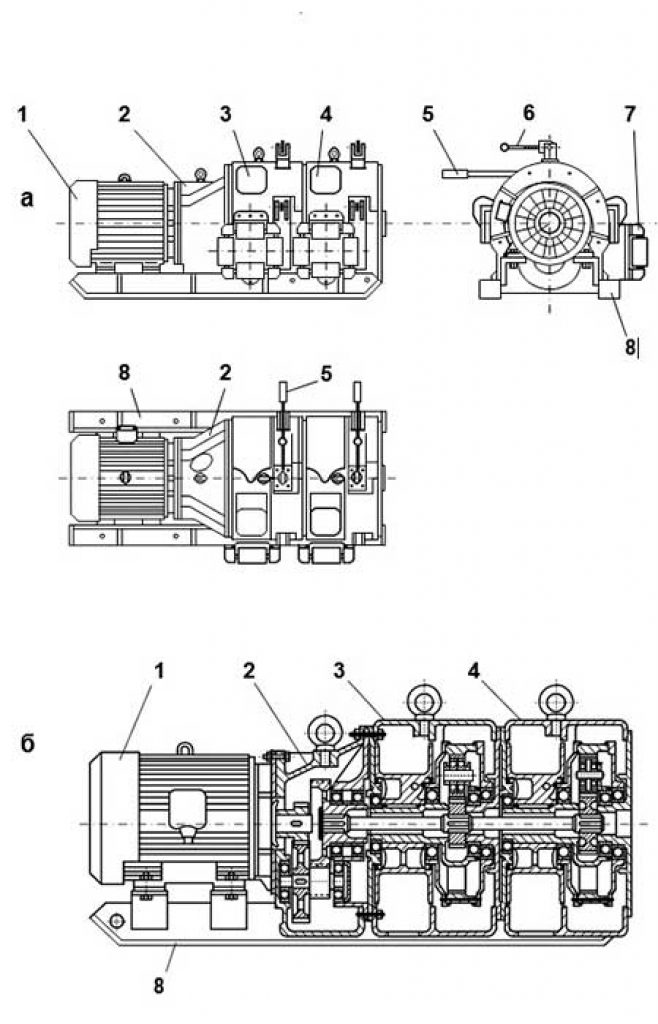
Лебедка геофизическая каротажная электрическая ЛГЭ предназначена для проведения спуско-подъемных работ в рудных, угольных, гидрогеологических, инженерно-геологических, промысловых скважинах глубиной до м модификации до м, м, м с геофизическим кабелем, тросом или проволокой. Принцип действия каротажной лебедки:. Вращение барабана осуществляется асинхронным трехфазным двигателем с помощью транзисторного частотного преобразователя. Частотный преобразователь позволяет плавно регулировать вращение электродвигателя, передающего крутящий момент через редуктор к барабану, что позволяет проводить спуско-подъемные операции на различных скоростях, сохраняя мощность, устраняя аварийные ситуации. Укладка кабеля осуществляется электрическим кабелеукладчиком с электронной корректировкой. Лебедка может быть снабжена трехроликовой измерительной системой датчик глубины, датчик натяжения, датчик магнитных меток , технологическим барабаном для перемотки.












Судовой электрик - Электроприводы грузоподъемных устройств
В статье описаны системы регулирования двигателя постоянного тока как составной части электропривода траловой лебедки. Произведен анализ широко применяемых систем регулирования частотой вращения двигателя постоянного тока : изменением внешнего напряжения, путем изменения сопротивления цепи и магнитного потока. Дано математическое описание процессов регулирования, на основании которых, с учетом особенности каждого метода, по структурной схеме в программе Matlab разработаны компьютерные модели каждого из описанных методов регулирования частоты вращения. На основе каждой компьютерной модели проведен ряд экспериментов, произведена обработка выходных электрических сигналов, изменений механического момента и угловой скорости. The control system of a DC motor as part of trawl winch electric drive is described in the article. The analysis of widely used systems for regulating the DC motor speed is carried out: by changing the external voltage, by changing the circuit resistance and magnetic flux.








Для становых лебедок земснарядов, работающих траншейным способом, и папильонажных лебедок земснарядов, работающих папильонажным способом, применяют регулируемый электропривод. Схема управления электроприводом должна предусматривать возможность ввода, управляющего сигнала от системы автоматизации грунтозабора. На вновь строящихся земснарядах для становых и папильонажных лебедок, требующих плавного изменения скорости выбирания каната, применяют вентильный электропривод или систему магнитный усилитель-двигатель. Использование электромагнитных муфт скольжения также обеспечивает плавность регулирования скорости исполнительного механизма и возможность автоматизации процесса ее регулирования. Система управления регулируемых приводов должна стабилизировать заданную скорость движения исполнительного механизма в пределах нормальных нагрузок и ограничивать вращающий момент и потребляемую силу тока предельно допустимым значением, т.